
Die moderne Automatisierung entwickelte sich aus der Steuerungs- und Regelungstechnik. Bestandteile dieser Technik waren anfangs einfache Befehlsschalter und Verriegelungen. Hinzu kamen Steuerschaltungen mit Schützen oder pneumatischen bzw. hydraulischen Ventilen und Analogregler, die bestimmten Stellgliedern zugeordnet wurden. Durch den Einsatz der Halbleitertechnik in den 70er-Jahren und dem Aufkommen der Mikroprozessoren entwickelte sich die Automatisierungstechnik im Funktionsumfang bis zur vollständigen Erfassung aller digitalen sowie analogen Aufgaben.
Die Automatisierungstechnik ist ein Verfahren, bei dem künstliche Mittel eingesetzt werden, damit ein Vorgang selbsttätig abläuft. Hierzu ist es notwendig Informationen transportieren und auszutauschen, um einen Prozess optimal anzupassen. Immer dann, wenn es zwischen Mensch und Maschine oder Maschine und Maschine zu einem Informationsaustausch kommt, geschieht eine Übermittlung von Signalen. Diese Signale (von Sensoren oder Geber) werden von einem Automatisierungsgerät (beispielsweise SPS, PC, Steuerung) erfasst, verarbeitet und weitergeleitet. Bausteine der Automatisierungstechnik können Aufnehmer unterschiedlicher physikalischer Größen, Steuerungseinheiten, Roboter und Maschinen sein. Zusammengestellt zu Bearbeitungszentren oder Automatisierungsinseln wird der Automatisierungsprozess optimiert.
Die Automatisierungstechnik wird vor allem dort eingesetzt, wo sich Arbeitsabläufe verbessern oder verkürzen lassen, wie beispielsweise in der Fertigungstechnik, Kraftfahrzeugtechnik als auch in der Haushaltstechnik. Ein Automatierungsgerät gilt hierbei als Kernstück einer Automatisierung. Aufgrund der vielseitigen Anwendung und der Problemfeldbezogenheit ist dies meist eine Speicherprogrammierbare Steuerung (SPS). SPS haben eine Rechnerstruktur bestehend aus CPU, Arbeitsspeicher, E/A-Logik und Bussystem. Der Unterschied zu PC's besteht in der Pheripherie (Ein-/Ausgabe) sowie in der Programmierung.
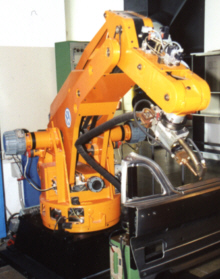
Durch die Weiterentwicklung der Computertechnik mit ihren immer schneller und leistungsfähigeren Mikroprozessoren ist es möglich immer komplexere Aufgaben zu bewältigen. In Verbindung mit Automatisierungtechnik fällt in letzter Zeit häufig der Ausdruck Robotertechnik. Der Roboter gilt als das typische mechatronische System, weil hierbei mechanische und elektrische Komponenten sowie programmtechnische Aufgaben interaktiv zusammenwirken müssen. In der Robotertechnik unterscheidet man zwischen Industrieroboter und Serviceroboter. Zur klassischen Roboterbauform zählt der Industrieroboter, der fest montiert in Produktionssystemen verwendet wird. Seine Aufgabe besteht in der Konturbearbeitung oder der Palettierung, wo er Bewegungsabläufe mit hoher Wiederholgenauigkeit durchführen muß. Für automatische Transporttätigkeiten oder als intelligenter Assistent werden Serviceroboter eingesetzt. Da diese nicht an feste Bahnen gebunden sind, müssen Sensoren und Kameras das Umfeld beobachten und die Bewegungen diesbezüglich anpassen. Die Auswertung und Berechnung solcher Systemreaktionen setzt eine hohe Rechenleistung voraus, die durch die modernen Prozessoren erst ermöglicht wurde.